Die Geschichte der Roboterchirurgie begann in den 1980er-Jahren mit dem Roboter PUMA 560, der 1985 zur Erhöhung der Präzision neurochirurgischer Biopsien eingesetzt wurde. Darauf folgte die Entwicklung von PROBOT, welcher spezifisch für die transurethrale Resektion der Prostata eingesetzt wurde. Es folgte die Entwicklung weiterer Systeme in verschiedenen chirurgischen Disziplinen, hier sei als Beispiel der ROBODOC oder CASPAR genannt, welche angefertigt wurden, um bei Hüftgelenksersatzoperationen mit grösserer Präzision zu arbeiten. Die anfänglichen Plattformen waren oft verfahrensspezifische, computergestützte und bildgeführte Systeme, die das Potenzial der Roboterchirurgie beweisen konnten. Sowohl die NASA als auch das US-Verteidigungsministerium begannen mit der Forschung an telechirurgischen Systemen, die letztendlich zur Entwicklung von zwei kommerziell erhältlichen Systemen führten, dem Da-Vinci-System (Intuitive Surgical) und ZEUS (Computer Motion), welche im Jahr 2003 fusionierten. Hierbei wurde das ZEUS-System zugunsten des Da-Vinci-Systems eingestellt.
Der erste Prototyp der Firma Intuitive war Lenny, eine Abkürzung für Leonardo. Bei diesem Prototyp wurde ein Gelenk um die Einführachse ergänzt. Dadurch wurde für jeden der drei Roboterarme ein sechster und siebter Freiheitsgrad geschaffen. Leider war Lenny mechanisch nicht zuverlässig und bot dem Chirurgen keine hochwertige Visualisierung. Auf Lenny folgte Mona, dieser Roboter wies in einem sterilen Feld austauschbare Instrumente auf. Die erste am Menschen durchgeführte Roboter-assistierte Operation war 1997 eine Cholezystektomie. Seither hat sich der Da-Vinci-Roboter in diversen operativen Bereichen (Urologie, Viszeralchirurgie) durchgesetzt, wobei in den letzten Jahren weitere Unternehmen Roboter-Systeme für den Operationssaal entwickelten. In diesem Artikel werden die fortschrittlichsten Roboterplattformen vorgestellt (Tabelle).

Abbildung 1: Intuitive Surgical
Da Vinci
Das Da-Vinci-System ist eine Master-Slave-Roboterplattform. Sie wurde von Intuitive Surgical (Sunnyvale, USA) entwickelt (Abbildung 1), 1998 von der Food and Drug Administration (FDA) zugelassen und initial für Cholezystektomien freigegeben. Das Conformité Europëenne (CE)-Zertifikat wurde 2017 erlangt. Mehrere Varianten des Da Vinci sind seit 25 Jahren im Einsatz und finden in der Allgemein-, Herz-, Neuro-, Thoraxchirurgie, HNO, Gynäkologie und Urologie Anwendung. Zu den Merkmalen gehören eine dreidimensionale (3-D) High-Definition (HD)-Kamera mit Binokular-Sicht und drei weitere Instrumentenarme, wobei die Instrumente mit sieben Freiheitsgraden artikulieren. Es gibt mehrere Serien, darunter Da Vinci S, Si, X, Xi (2014) und SP (Single Port). Alle Generationen folgen demselben Konzept mit Roboterarmen, die an einem einzigen Patientenwagen befestigt sind. Der Da Vinci Xi ist mit dünneren Roboterarmen sowie längeren Instrumenten und einer 8-mm-Kamera ausgestattet. Seitliches Andocken wurde mit den da Vinci Si- und Xi-Systemen ermöglicht, was einen besseren Zugang zum Kopf des Patienten ermöglicht.

Abbildung 2: Asensus Surgical
Senhance
Das chirurgische System Senhance ist eine von TransEnterix entwickelte Master-Slave-Robotik-Plattform (Abbildung 2). Das italienische Unternehmen SOFAR wurde 2015 von der US-Firma TransEnterix übernommen. Zu den Merkmalen gehören das offene Kontrollzentrum, Griffe mit haptischem Feedback, ein 2-D- oder 3-D-HD-Monitor, ein Infrarot-Eye-Tracking-System zur Steuerung der Kameramanipulation und bis zu vier getrennte und unabhängige Roboterarme sowie wiederverwendbare endoskopische 5-mm-Instrumente. Den Hauptvorteil stellen hierbei die reduzierten Kosten dar, welche durch die Verwendung herkömmlicher laparoskopischer Geräte bedingt sind. Zu den Kritikpunkten gehören die Grösse des Systems und die längere Zeit, die man zum Andocken der Roboterarme benötigt. Es bestehen Pläne für ein „Machine-Vision-System“ – eine Form künstlicher Intelligenz, bei der das System die Kamera auf der Grundlage früherer Eingriffe und der Manipulation der Instrumente der Chirurg:innen bewegt.
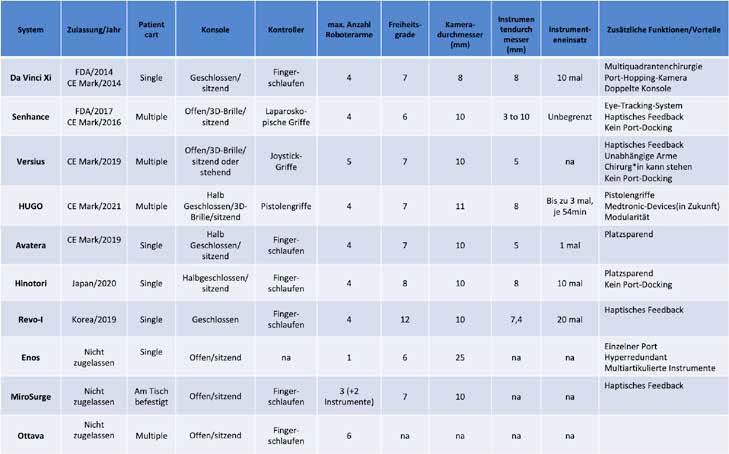
Tabelle
Versius
Das Versius-System ist eine chirurgische Master-Slave-Plattform, die von Cambridge Medical Robotics Limited (CMR Ltd) Surgical im Vereinigten Königreich entwickelt wurde (Abbildung 3). Versius erhielt 2019 das CE-Zertifikat und verfügt über eine offene Konsole, die es der Chirurg*in ermöglicht, mit der 3-D-Brille sowohl zu sitzen als auch zu stehen. Die Instrumente haben einen Durchmesser von 5 mm. Die Chirurg*in kann bis zu fünf Roboterarme verwenden, jede einzelne Robotereinheit bringt eine grössere Freiheit bei der Platzierung des Ports mit sich. Die Technologie bietet eine 360-Grad-Bewegung des Gelenkes mit sieben Freiheitsgraden einschliesslich eines haptischen Feedbacks.

Abbildung 3: CMR Surgical Ltd.
Hugo RAS
Das Hugo RAS-System (Abbildung 4) ist eine von Medtronic entwickelte Master-Slave-Roboterplattform. Die Entwicklung folgte der Übernahme des in Deutschland ansässigen Robotersystems Miro-Surge im Rahmen der Übernahme von Covidien im Jahr 2014. Die Operateurkonsole verwendet ein sitzendes, halboffenes Design, Pistolengriffe und erfordert eine 3-D-Brille für die HD-Visualisierung. Jeder Roboterarm (sieben Freiheitsgrade) ist an einem individuellen Wagen befestigt und erhöht damit die Modularität. Das Hugo RAS-System erhielt im Oktober 2021 das CE-Zertifikat, das den Verkauf des Systems in Europa autorisiert. Die Medtronic Devices zur robotischen Anwendung werden mit Spannung erwartet.

Abbildung 4: Medtronic
Die Plattform besteht aus einer halbgeschlossenen Konsole mit vier Roboterarmen, die auf einem Wagen montiert sind. 5-mm-Instrumente für den Einmalgebrauch mit Pinzetten-ähnlichen Griffen ermöglichen sieben Freiheitsgrade und eine HD-3D-Kamera ist ebenfalls vorhanden. Einzigartig ist die platzsparende Kompaktbauweise.
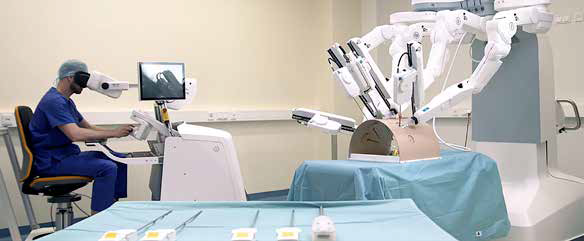
Abbildung 5: Avateramedical
Hinotori
Kawasaki Heavy Industries, ein führendes Unternehmen für Industrieroboter, und Sysmex, ein erfahrener Business Player im medizinischen Bereich, gründeten 2013 durch ein Joint Venture Medicaroid. Medicaroid begann mit der Entwicklung des chirurgischen Robotersystems Hinotori auf der Grundlage des Konzepts der „Koexistenz von Mensch und Roboter“ (Abbildung 6). Das Hinotori-
Chirurgiesystem erhielt im August 2020 die japanische Zulassung und die europäische ist beantragt. Das einfache Andocksystem mit vier Roboterarmen, die nur am Wagen und nicht an den Ports befestigt sind, und die Instrumente mit acht Freiheitsgraden werden beworben. Die Chirurg*in verwendet eine halboffene Konsole mit einem Mikroskopie-ähnlichen Okular.
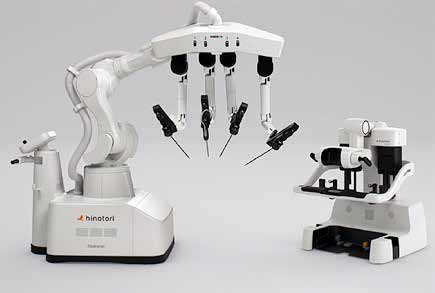
Abbildung 6: Medicaroid Corporation
Andere Systeme
Revo-I-Modell MSR-5000: Meere Company Incorporated, ein koreanisches Unternehmen, entwickelt seit 2006 das Revo-I-Modell. Es ist eine Master-Slave-Roboter-Chirurgieplattform. Das Revo-IModell MSR-5000 wurde im August 2017 von der koreanischen Regierung für die kommerzielle Nutzung zugelassen, hat jedoch bisher weder das FDA- noch das CE-Zertifikat erhalten. Das Revo-I- Modell MSR-5000 umfasst eine geschlossene Konsole, einen 4-Arm-Roboterwagen, eine 3-D-HD-Vision sowie wiederverwendbare endoskopische Instrumente. Die Instrumente bieten mit zwölf Freiheitsgraden die grösste Flexibilität.
Enos-Chirurgiesystem: Das Enos-Chirurgiesystem entstand 2020 aus der Single-Port-Orifice-Robotertechnologie (SPORT), die von der kanadischen Firma Titan Medical (Toronto, Kanada) entwickelt wurde. Enos hat jedoch bisher keine FDA-Zulassung oder CE-Zertifizierung. Es verfügt über einen einarmigen mobilen Patientenwagen, ein multiartikulierendes Endoskop und Instrumente mit sechs Freiheitsgraden.
MiroSurge: Der MiroSurge des DLR (Deutsches Zentrum für Luftund Raumfahrt) ist ein weiterer Master-Slave-Roboter, hat aber derzeit noch keine behördliche Zulassung. Das MiroSurge ist ein modulares System, das mehrere Roboterkomponenten vereint. Die Plattform umfasst eine offene Sitzkonsole mit einem 3-D-HDVideodisplay und Instrumente mit drei Freiheitsgraden.
Ottava: Zuvor war diese Master-Slave-Roboterplattform ein Joint Venture von Ethicon, Johnson & Johnson und Verily (einer biowissenschaftlichen Forschungsorganisation innerhalb von Google, Inc.). Erste Berichte deuten darauf hin, dass möglicherweise sechs Roboterarme direkt am Operationstisch befestigt sind. Bisher gibt es jedoch keine validen Informationen über diese Roboterplattform.
Fazit
Die Roboter-assistierte Chirurgie ermöglicht es, fortgeschrittene Eingriffe minimalinvasiv mit einer kürzeren Lernkurve und/oder einer schnelleren Übernahme spezifischer Fähigkeiten durchzuführen.
Die Vorteile der Roboterchirurgie erweitern den Umfang der chirurgischen Eingriffe, die durch minimalinvasive Techniken durchgeführt werden können. Trotz der zunehmenden Verwendung der verschiedenen Roboterplattformen in der allgemeinen und hepatopankreato-biliären Chirurgie gibt es immer noch einen Mangel an wissenschaftlicher Evidenz zum Vergleich der verschiedenen Modelle (Tabelle 1). Darüber hinaus warten viele Modelle noch auf die behördliche Genehmigung. Kostenvergleiche sind derzeit schwierig, da viele dieser Plattformen noch nicht im Handel erhältlich sind bzw. eine Verwendung nur im Rahmen von Studien erfolgt. Weitere Forschung und direkte Vergleiche von Roboterplattformen werden notwendig sein, um die klinischen Ergebnisse, die Vorteile und die wirtschaftliche Nachhaltigkeit zu untersuchen.
Referenzen:
Koukourikis P, Rha KH. Robotic surgical systems in urology: What is currently available? Investig Clin Urol. 2021 Jan;62(1):14-22. doi: 10.4111/icu.20200387. PMID: 33381927; PMCID: PMC7801159.
Cepolina F, Razzoli RP. An introductory review of robotically assisted surgical systems. Int J Med Robot. 2022 Aug;18(4):e2409. doi: 10.1002/rcs.2409. Epub 2022 May 4. PMID: 35476899; PMCID: PMC9540802.
George EI, Brand TC, LaPorta A, Marescaux J, Satava RM. Origins of Robotic Surgery: From Skepticism to Standard of Care. JSLS. 2018 Oct-Dec;22(4):e2018.00039. doi: 10.4293/JSLS.2018.00039. PMID: 30524184; PMCID: PMC6261744.
Millan B, Nagpal S, Ding M, Lee JY, Kapoor A. A Scoping Review of Emerging and Established Surgical Robotic Platforms With Applications in Urologic Surgery. Soc Int Urol J [Internet]. 2021Sep.1;2(5):300-1. Available from: https://siuj.org/index.php/siuj/article/view/139